La mécanique de Newton
Synthèse P9
I Vecteur
vitesse et vecteur accélération
Dans un référentiel
donné :
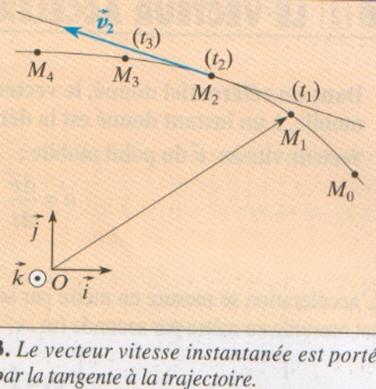
Le vecteur vitesse ![]() d’un point mobile M
est la dérivée par rapport au temps du vecteur position
d’un point mobile M
est la dérivée par rapport au temps du vecteur position ![]()
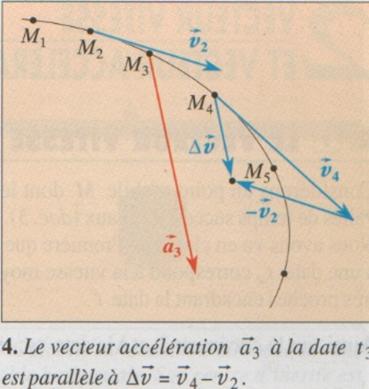
Le vecteur accélération ![]() d’un point mobile est la dérivée par rapport au temps du
vecteur vitesse de ce point mobile.
d’un point mobile est la dérivée par rapport au temps du
vecteur vitesse de ce point mobile.
 et
et 
voir les activités pour
savoir les tracer et les calculer à partir de documents chronoponctués.
II Lois de
Newton
II-1 première loi de
Newton
Dans un référentiel galiléen,
si le vecteur vitesse ![]() du centre d’inertie G
d’un solide ne varie pas, la somme des forces extérieures qui s’exercent sur le
solide est nulle et réciproquement.
du centre d’inertie G
d’un solide ne varie pas, la somme des forces extérieures qui s’exercent sur le
solide est nulle et réciproquement.
![]()
![]()
![]() est constant
est constant ![]()
II-2 Deuxième loi de
Newton
Dans un référentiel Galiléen,
la somme des forces extérieures appliquées à un solide est égale au produit de
sa masse par l’accélération de son centre d’inertie
![]()
III-3 Troisième loi de
Newton (loi des actions réciproques)
A et B étant deux corps, soit![]() , la force exercée de B sur A et
, la force exercée de B sur A et ![]() la force exercée par A sur B.
la force exercée par A sur B.
Quelque soit l’état de
mouvement de A par rapport à B on a toujours l’égalité vectorielle :
Ces deux forces ont même droite d’action et sont directement opposées.
On travaillera cette année exclusivement
dans des référentiels galiléens (référentiels où la première loi de Newton se
vérifie), le référentiel terrestre sera considéré comme Galiléen.
JMPodvin Juillet 2002
![]()